Diminishing Return of Value Expansion Methods
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> https://arxiv.org/abs/2412.20537
Curated feed of interesting and novel robotics papers.
Diminishing Return of Value Expansion Methods
Authors: Daniel Palenicek, Michael Lutter, João Carvalho, Daniel Dennert, Faran Ahmad, and Jan Peters Fellow
pre-print -> https://arxiv.org/abs/2412.20537
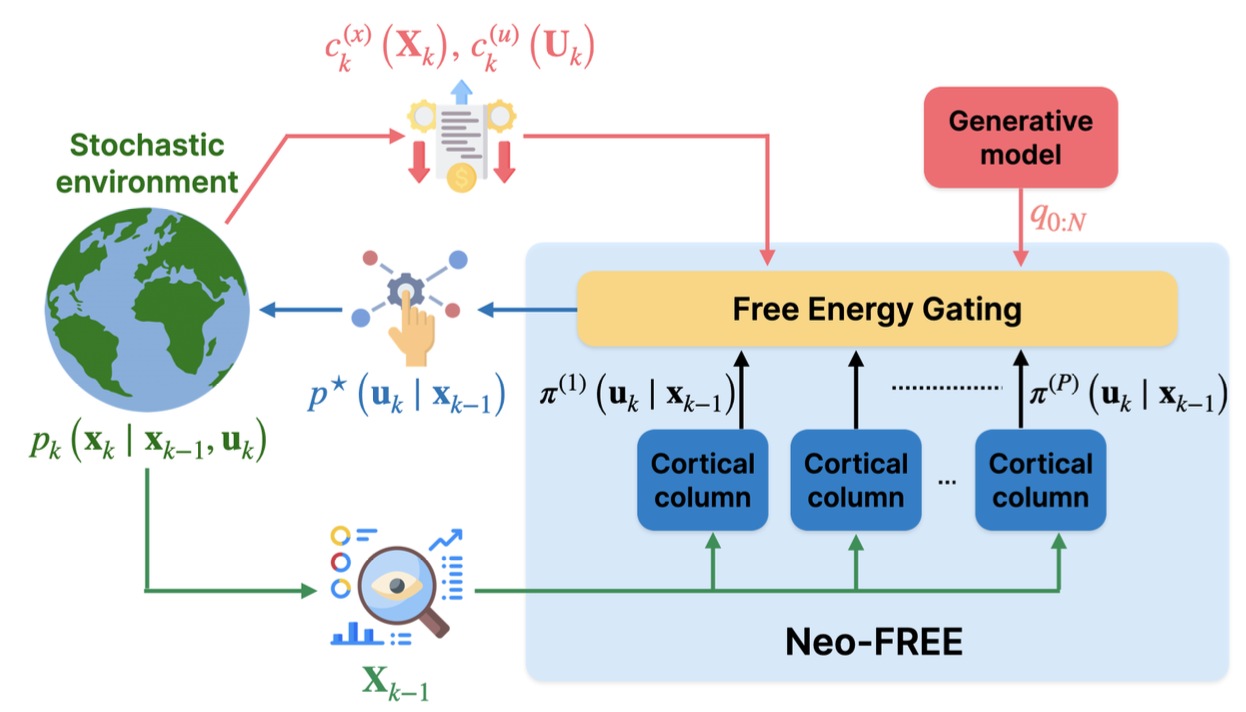
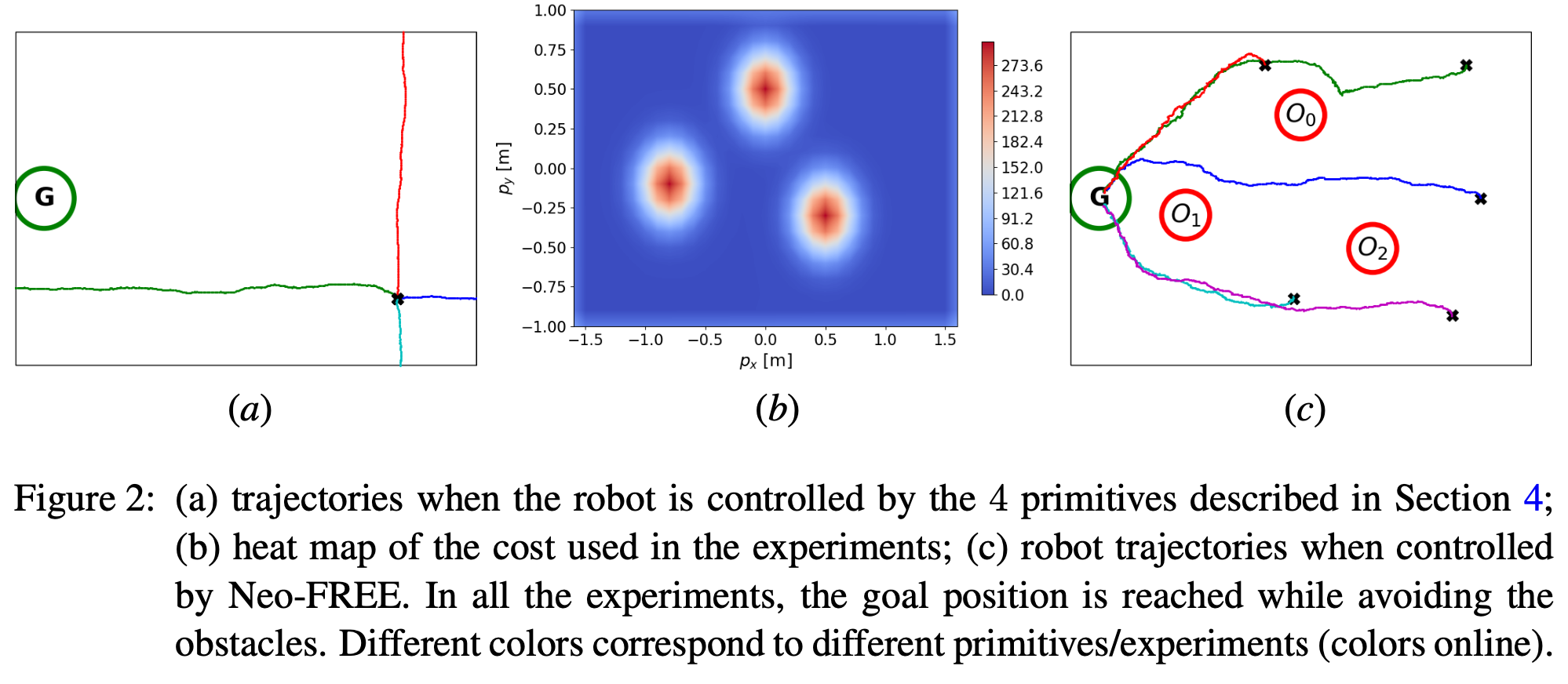
Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> https://arxiv.org/abs/2412.06636
code -> https://github.com/GIOVRUSSO/Control-Group-Code/tree/master/Neo-FREE
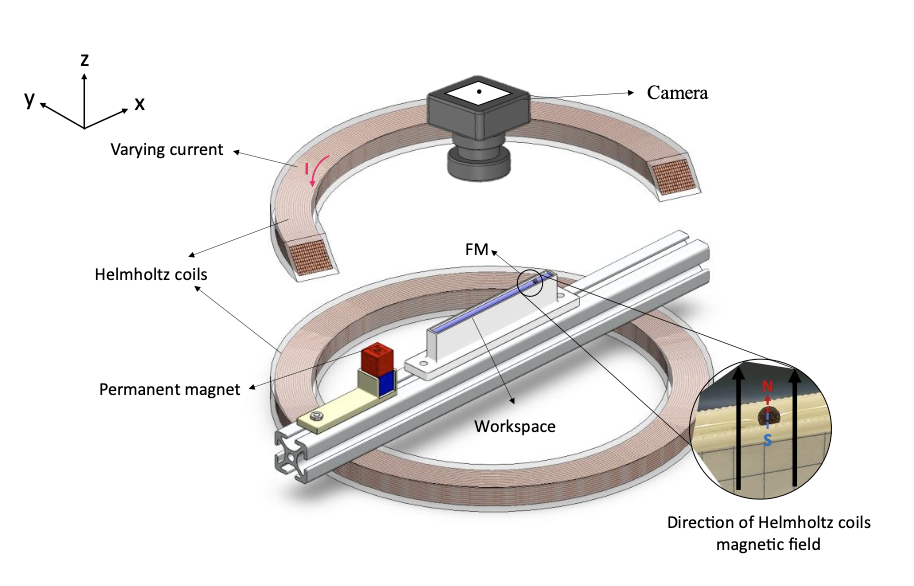
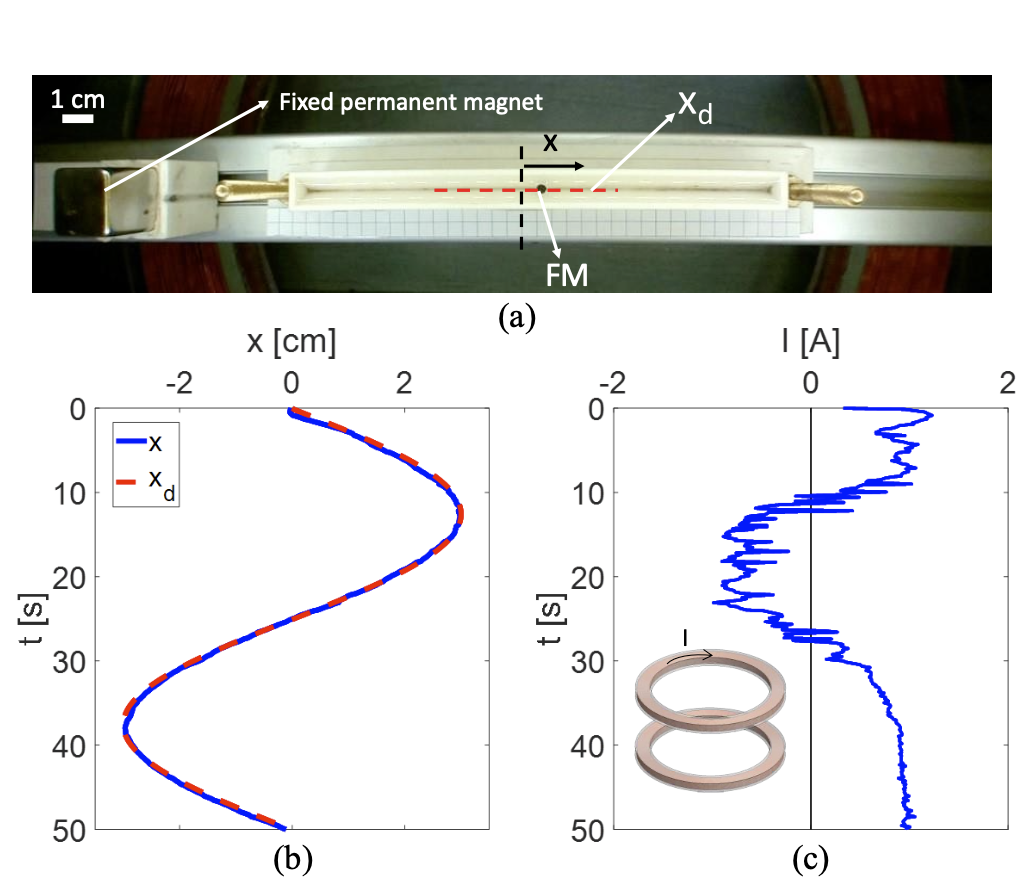
Novel Magnetic Actuation Strategies for Precise Ferrofluid Marble Manipulation in Magnetic Digital Microfluidics: Position Control and Applications
Authors: Mohammad Hossein Sarkhosh, Mohammad Hassan Dabirzadeh, Mohamad Ali Bijarchi, Hossein Nejat Pishkenari
pre-print -> https://arxiv.org/abs/2412.02859
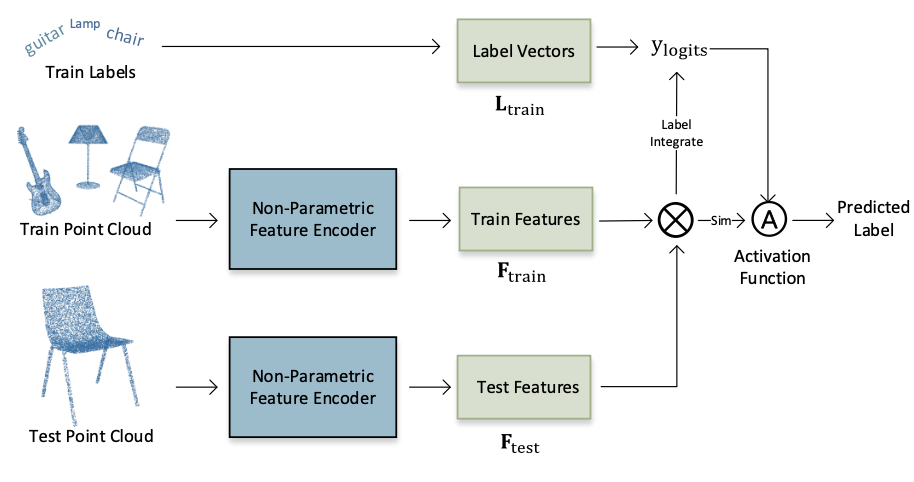
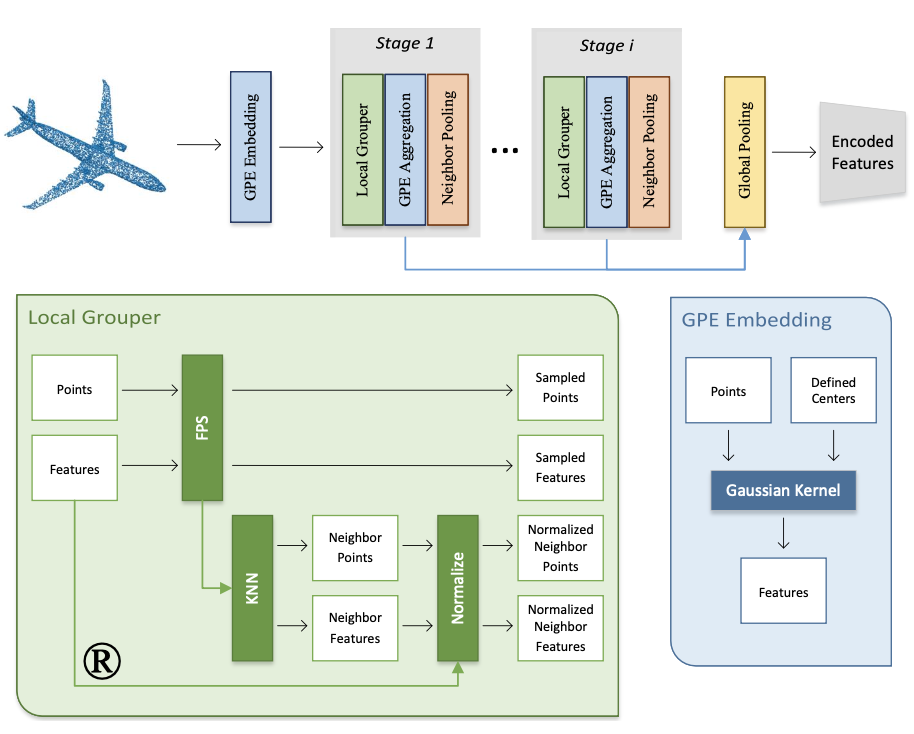
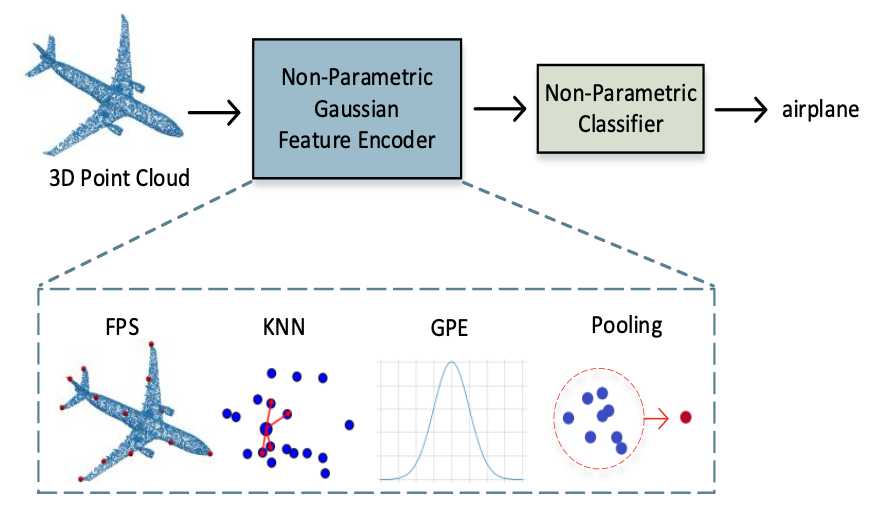
Point-GN: A Non-Parametric Network Using Gaussian Positional Encoding for Point Cloud Classification
Authors: Marzieh Mohammadi, Amir Salarpour
pre-print -> https://arxiv.org/abs/2412.03056
code (to come) -> https://github.com/asalarpour/Point_GN
#point_cloud #classification #positional_embedding #non_parametric
From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Authors: Johan Ubbink, Ruan Viljoen, Erwin Aertbeliën, Wilm Decré, Joris De Schutter
pre-print -> https://arxiv.org/abs/2412.01597v1
Show HN: Copper – Open-source robotics in Rust with deterministic log replay
https://github.com/copper-project/copper-rs/wiki/Copper-Release-Log
Discussions: https://discu.eu/q/https://github.com/copper-project/copper-rs/wiki/Copper-Release-Log
"Unlike vision and language, data for learning is not available passively[...]. This makes applying the same recipes we did in vision and language challenging"
#real2sim is a strong emergent tendency in robotics this year.
See previously shared articles:
RoboGSim -> https://arxiv.org/abs/2411.11839
RL-GSBridge -> https://arxiv.org/abs/2409.20291
GARField -> https://arxiv.org/abs/2410.05038
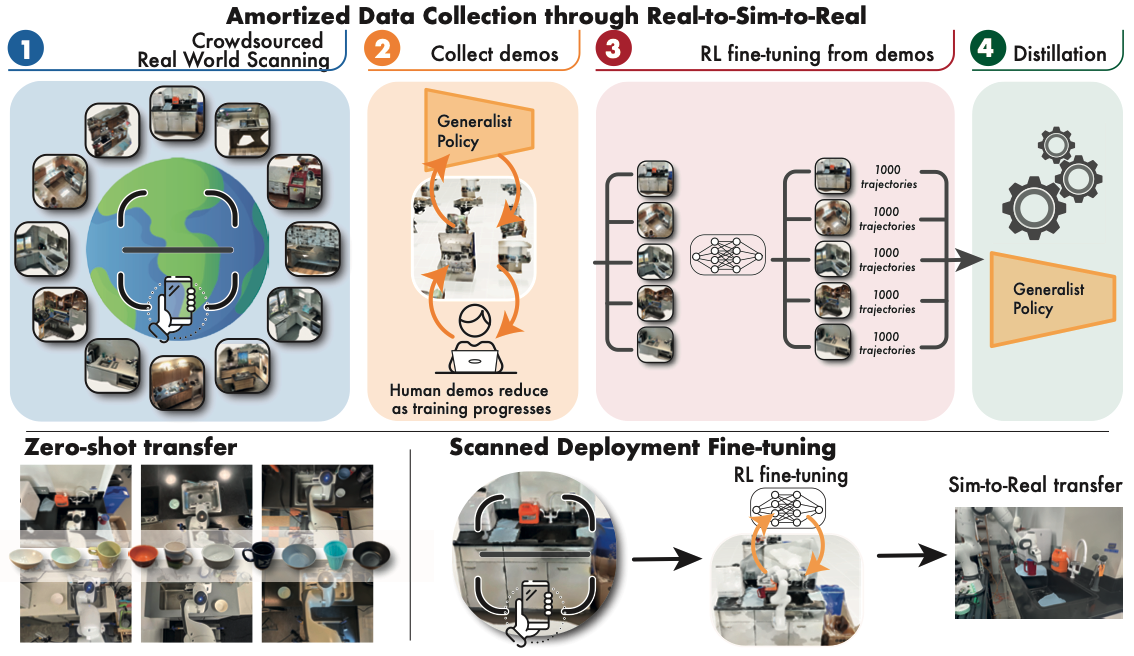
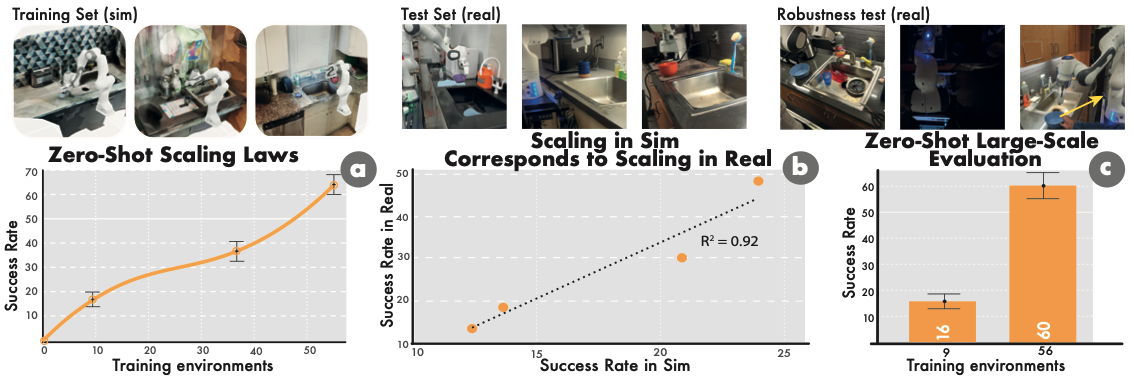
Robot Learning with Super-Linear Scaling
Authors: Marcel Torne, Arhan Jain, Jiayi Yuan, Vidaaranya Macha, Lars Ankile, Anthony Simeonov, Pulkit Agrawal, Abhishek Gupta
pre-print -> https://arxiv.org/abs/2412.01770v1
website -> https://casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real
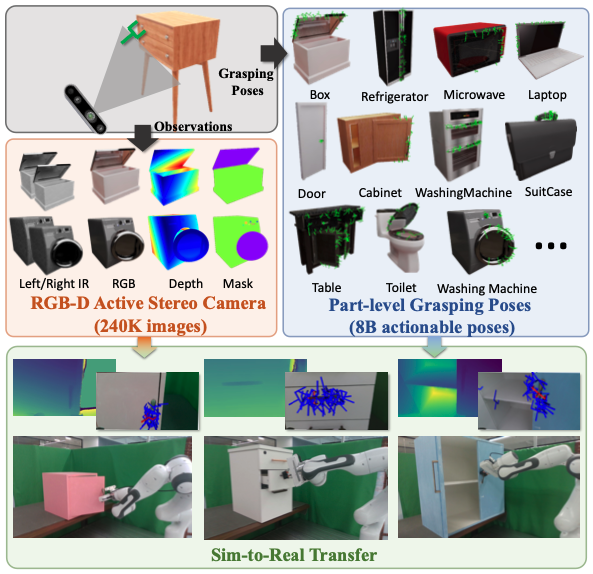
New synthetic dataset just dropped for the folks in articulated objects manipulation !
▶️ 918 object instances
▶️ 240k photo-realistic rendering images
▶️ 8 billion scene-level actionable interaction poses
⚠️ Data not released yet
GAPartManip: A Large-scale Part-centric Dataset for Material-Agnostic Articulated Object Manipulation
Authors: Wenbo Cui, Chengyang Zhao, Songlin Wei, Jiazhao Zhang, Haoran Geng, Yaran Chen, He Wang
pre-print -> https://arxiv.org/abs/2411.18276
#robotics #articulated_objects #manipulation #dataset #synthetic_data #data_generation

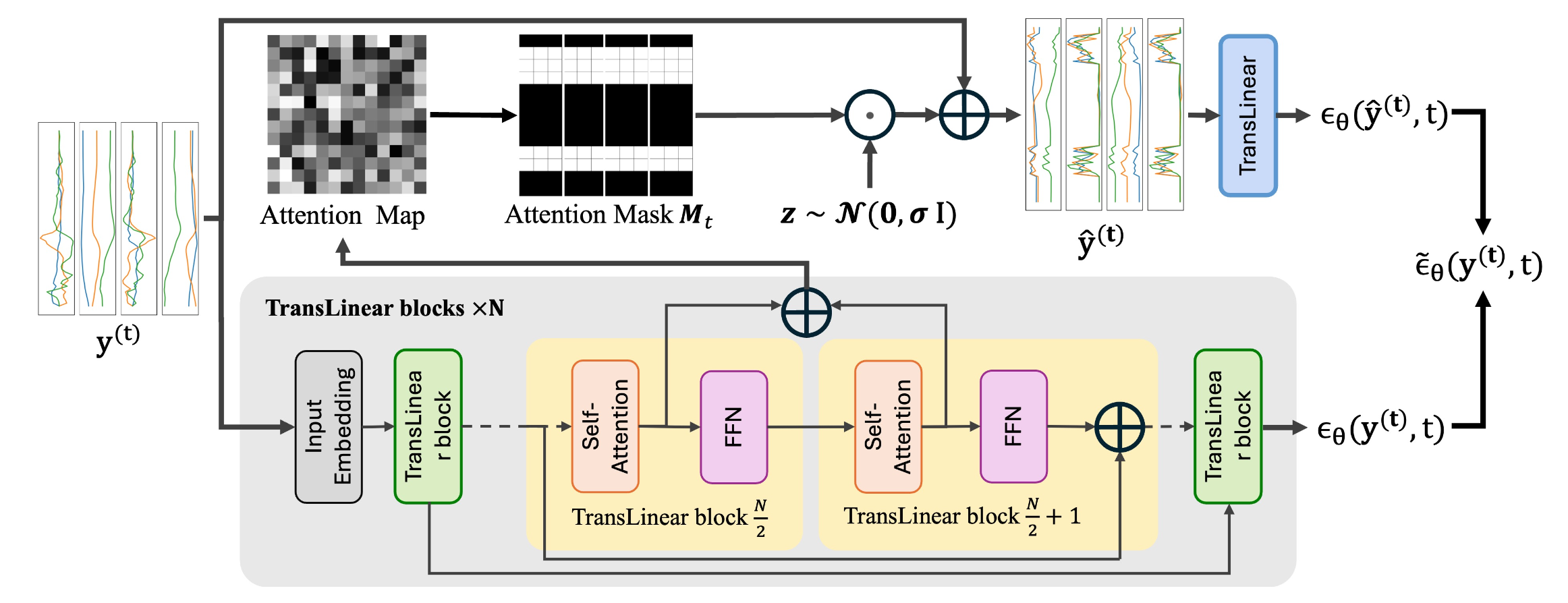
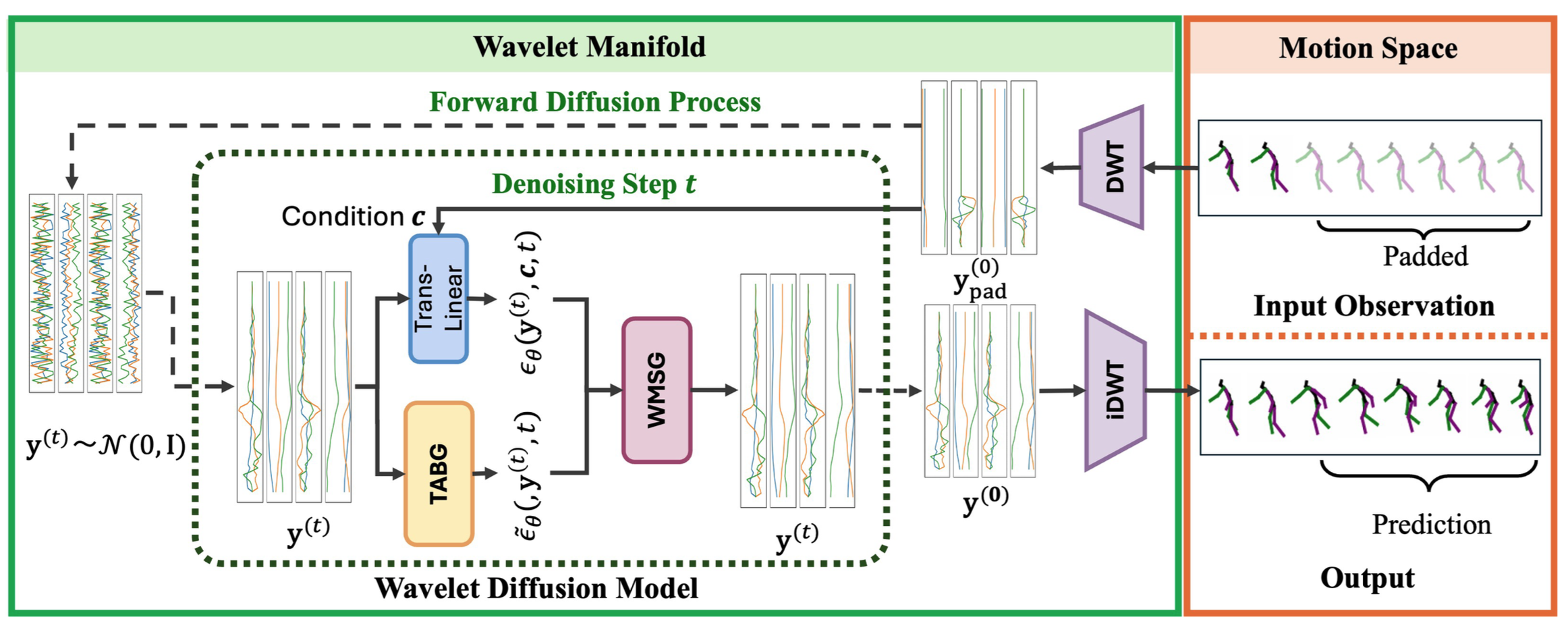
MotionWavelet: Human Motion Prediction via Wavelet Manifold Learning
Authors: Yuming Feng, Zhiyang Dou, Ling-Hao Chen, Yuan Liu, Tianyu Li, Jingbo Wang, Zeyu Cao, Wenping Wang, Taku Komura, Lingjie Liu
pre-print -> https://arxiv.org/abs/2411.16964
website -> https://frank-zy-dou.github.io/projects/MotionWavelet/
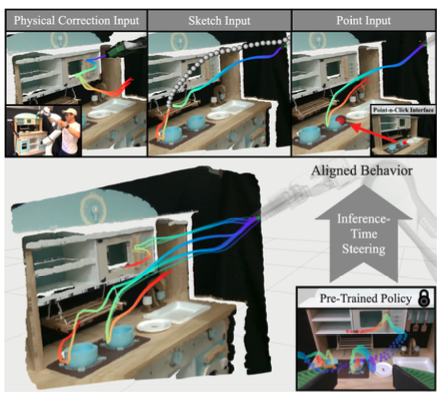
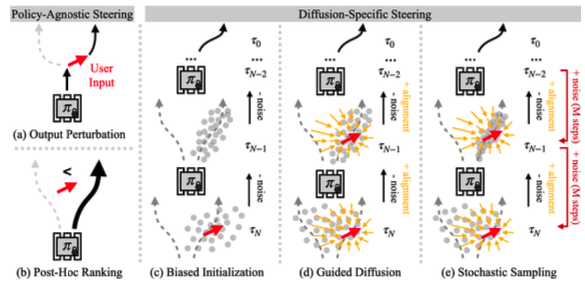
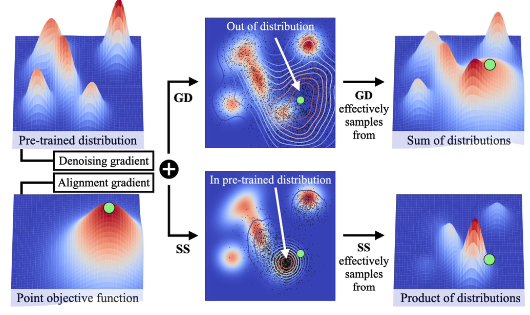
RL policies often get criticized for being "database" policies i.e. not reactive like MPC. This paper goes one step closer to rollout time by addressing the steering of a frozen policy generator at inference time to align with user intent
Inference-Time Policy Steering through Human Interactions
Authors: Yanwei Wang, Lirui Wang, Yilun Du, Balakumar Sundaralingam, Xuning Yang, Yu-Wei Chao, Claudia Perez-D'Arpino, Dieter Fox, Julie Shah
pre-print -> https://arxiv.org/abs/2411.16627
website -> https://yanweiw.github.io/itps/
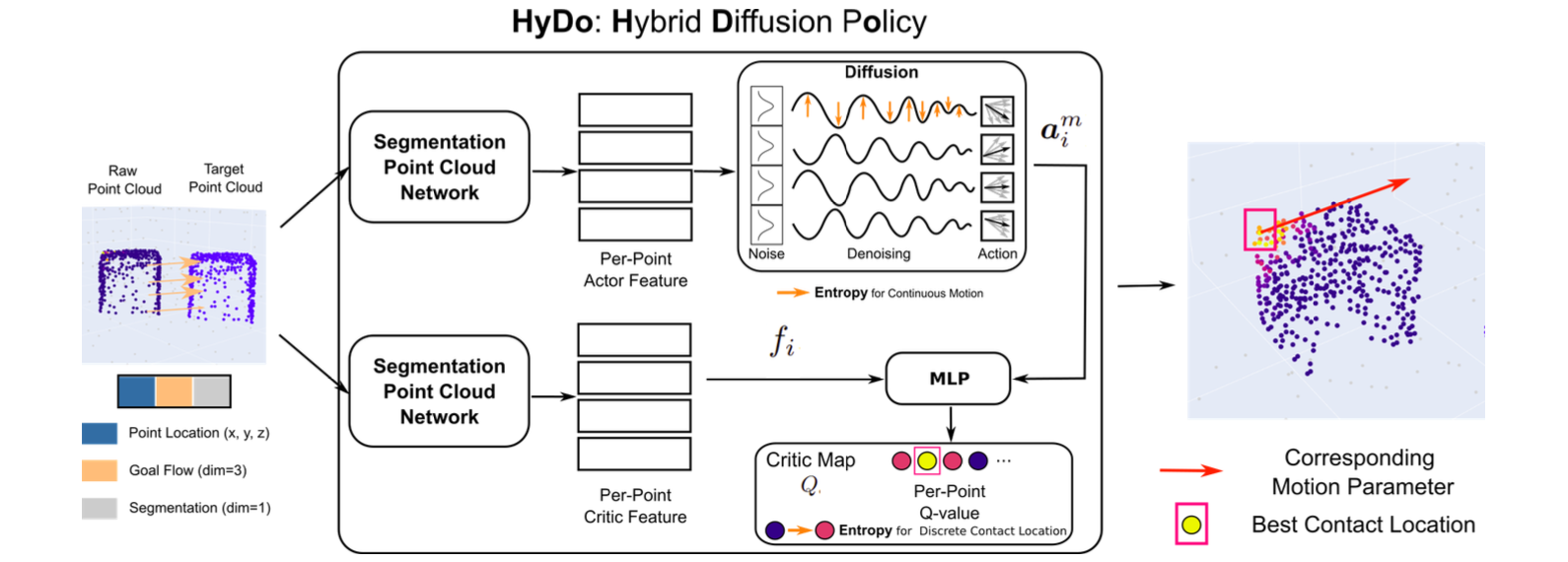
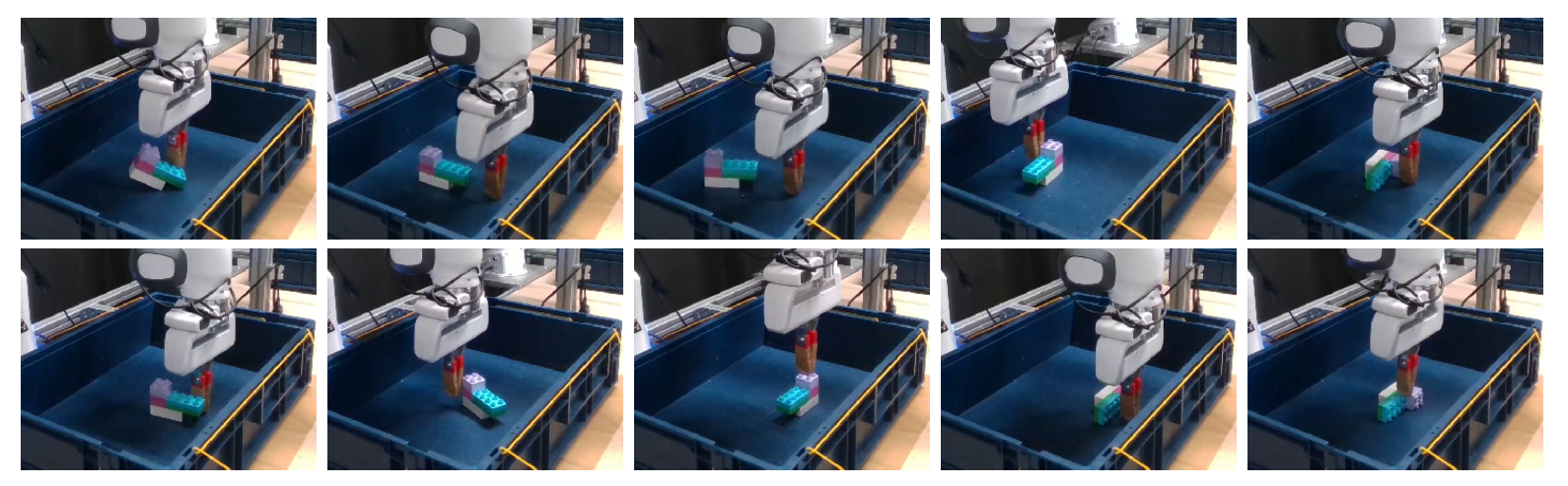
Enhancing Exploration with Diffusion Policies in Hybrid Off-Policy RL: Application to Non-Prehensile Manipulation
Authors: Huy Le, Miroslav Gabriel, Tai Hoang, Gerhard Neumann, Ngo Anh Vien
pre-print -> https://arxiv.org/abs/2411.14913
website -> leh2rng.github.io/hydo
#robotics #rl #reinforcement_learning #nonprehensile #manipulation #diffusion #entropy
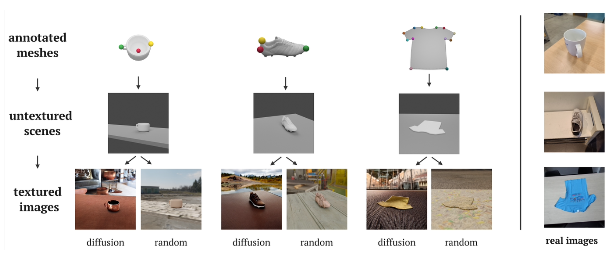
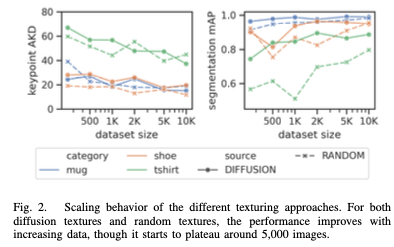
Evaluating Text-to-Image Diffusion Models for Texturing Synthetic Data
Authors: Thomas Lips, Francis wyffels
pre-print -> https://arxiv.org/abs/2411.10164
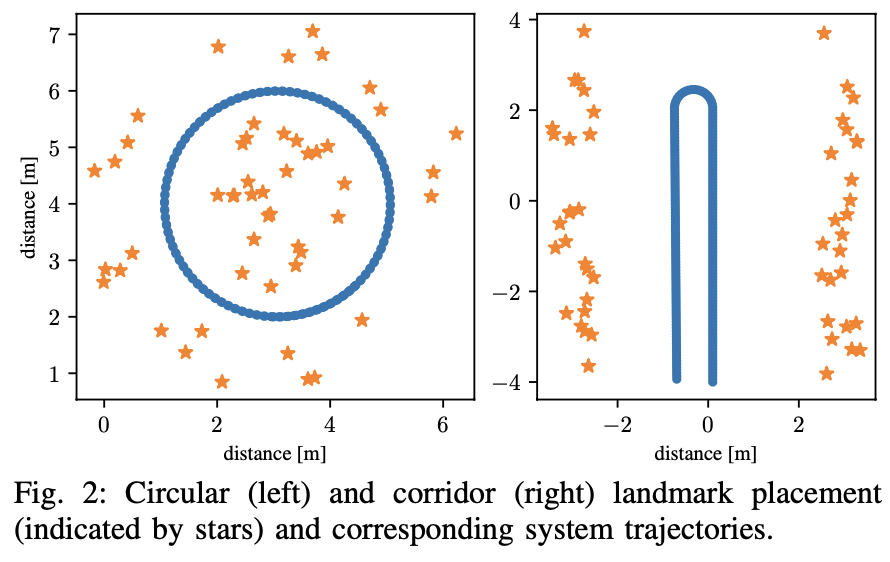
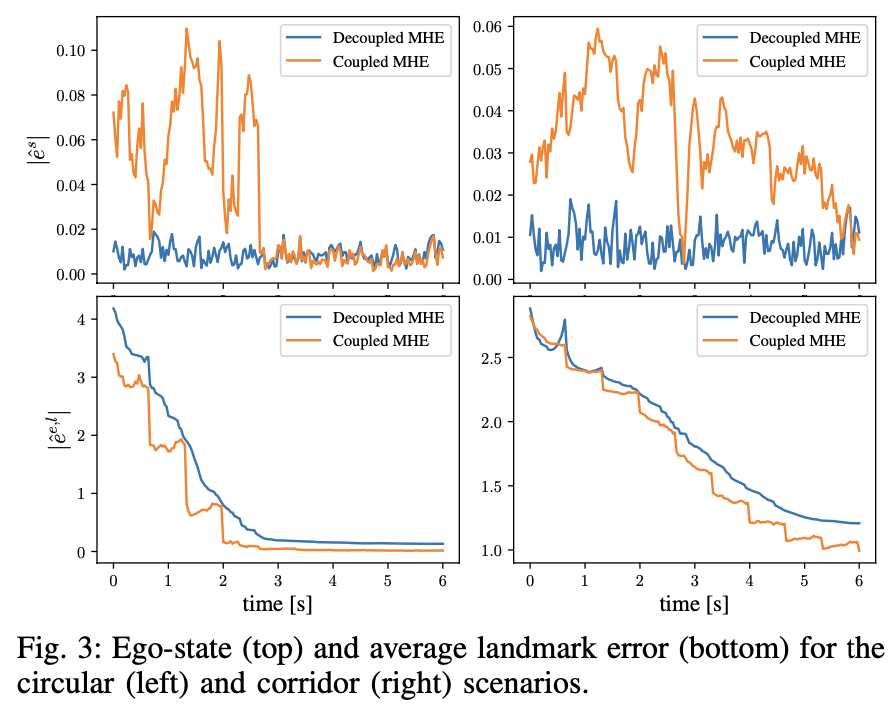
Moving Horizon Estimation for Simultaneous Localization and Mapping with Robust Estimation Error Bounds
Authors: Jelena Trisovic, Alexandre Didier, Simon Muntwiler and Melanie N. Zeilinger
pre-print -> https://arxiv.org/abs/2411.13310
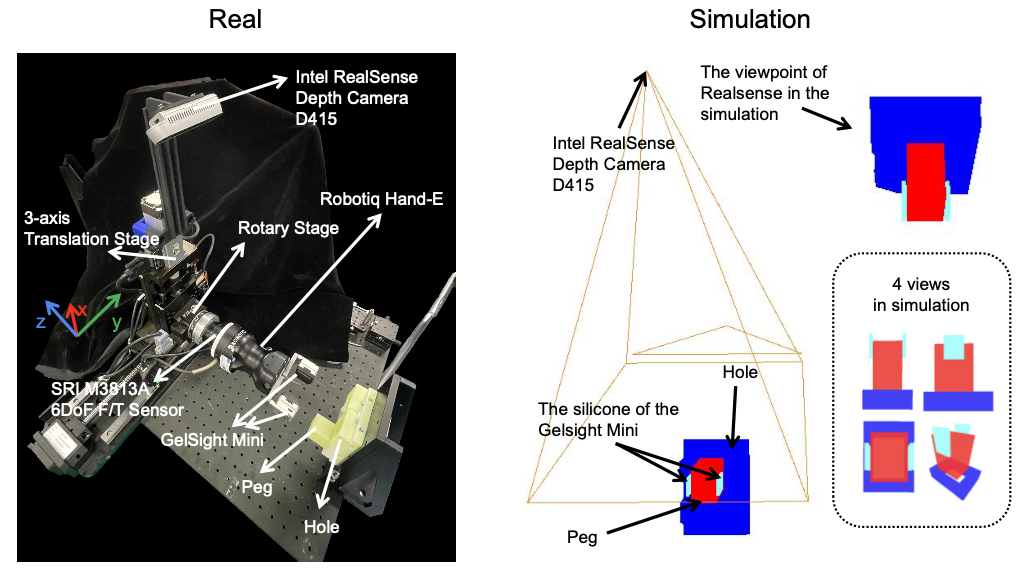
ManiSkill-ViTac 2025: Challenge on Manipulation Skill Learning With Vision and Tactile Sensing
Authors: Chuanyu Li, Renjun Dang, Xiang Li, Zhiyuan Wu, Jing Xu, Hamidreza Kasaei, Roberto Calandra, Nathan
Lepora, Shan Luo, Hao Su, Rui Chen
pre-print -> https://arxiv.org/abs/2411.12503v1
#robotics #challenge #tactile_sensing #visual_sensing #manipulation #contact_rich
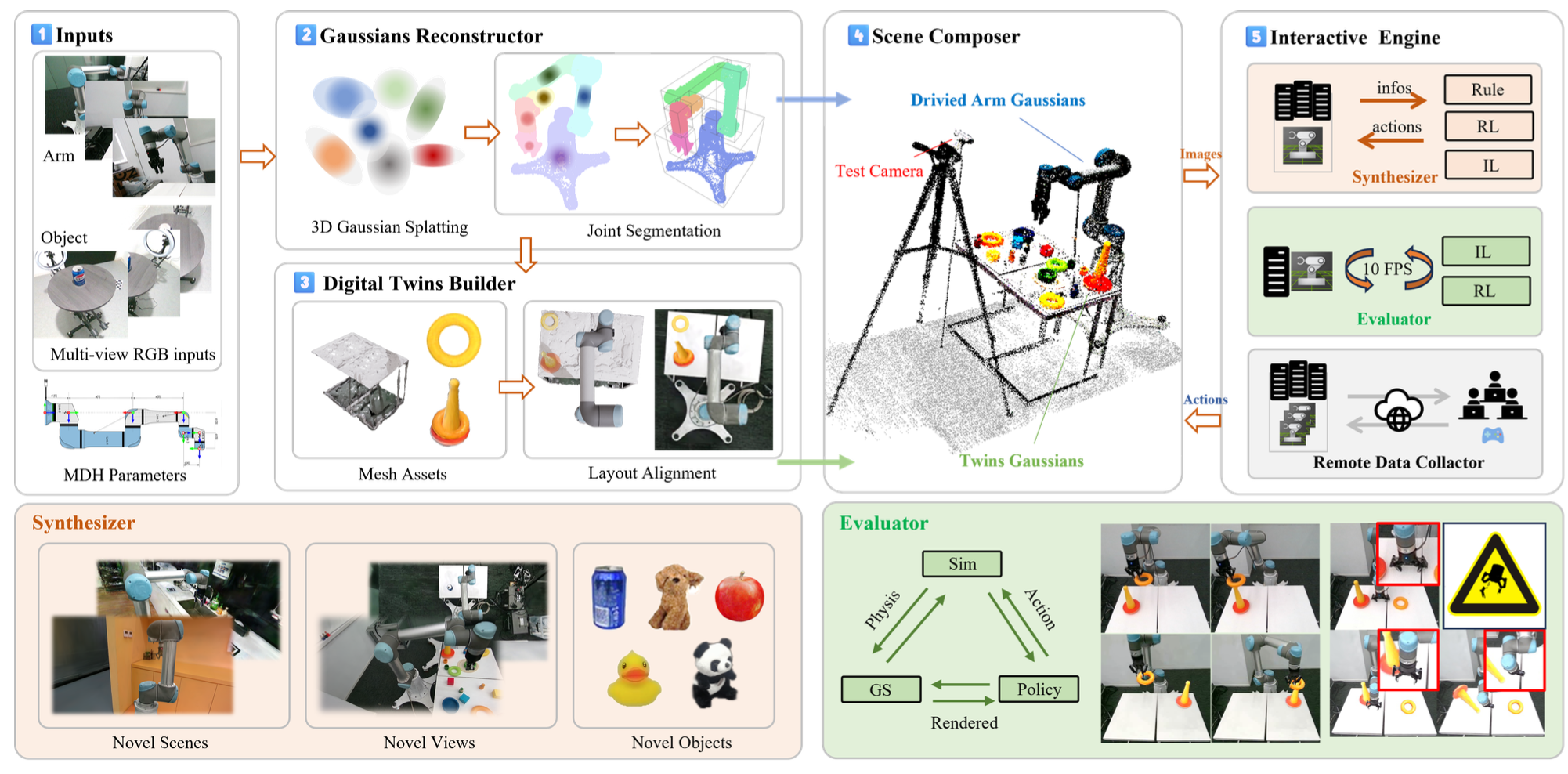
RoboGSim: A Real2Sim2Real Robotic Gaussian Splatting Simulator
Authors: Xinhai Li, Jialin Li, Ziheng Zhang, Rui Zhang, Fan Jia, Tiancai Wang, Haoqiang Fan, Kuo-Kun Tseng, Ruiping Wang
pre-print -> https://arxiv.org/abs/2411.11839
website -> https://robogsim.github.io
#robotics #manipulation #data_generation #sim2real #real2sim #real2sim2real

Researchers developed a tool that enables #robots to replicate the efficient, rhythmic movements found in nature. This advancement utilizes #IntrinsicDynamics to optimize robotic motion: http://go.tum.de/798175 🤖
📷A.Heddergott
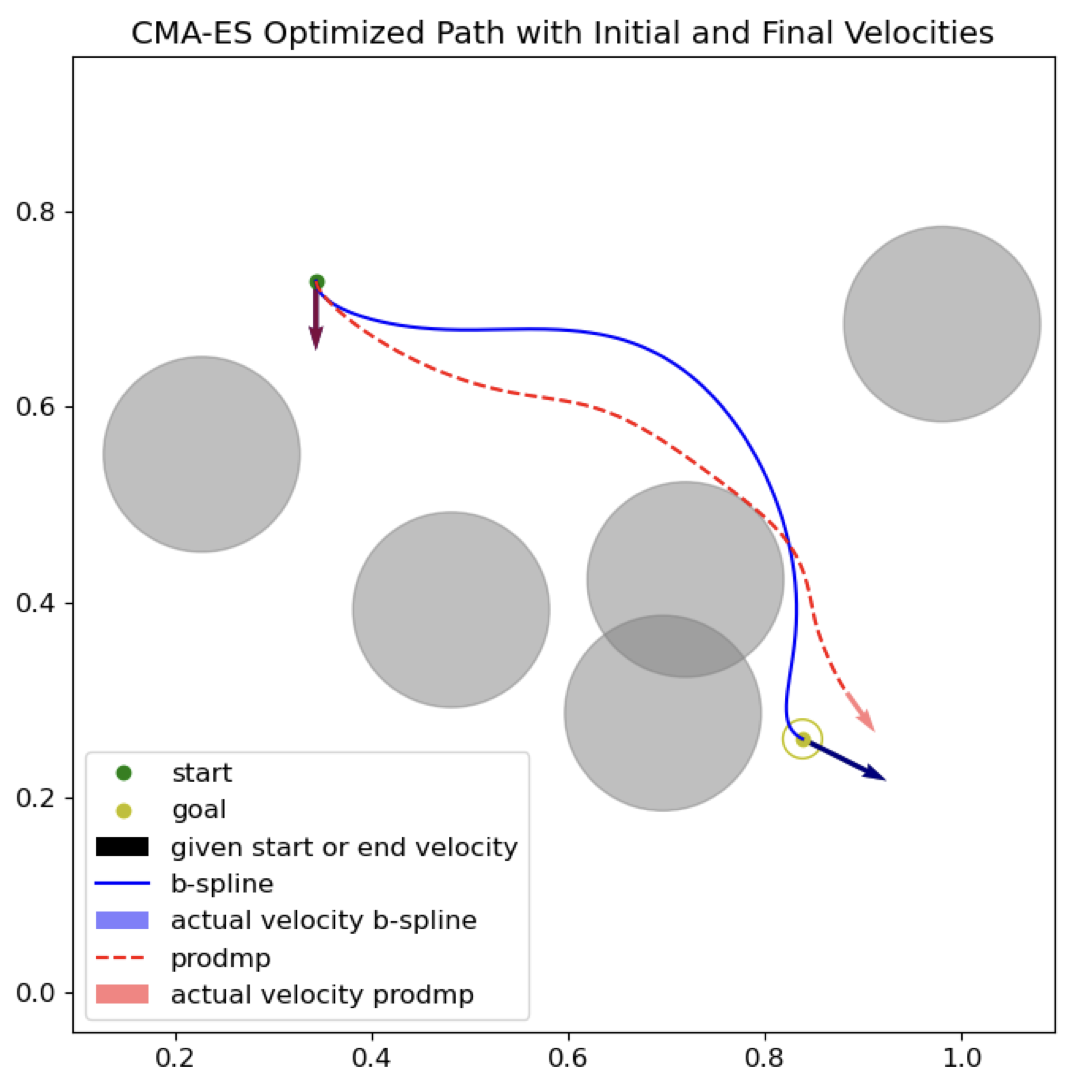
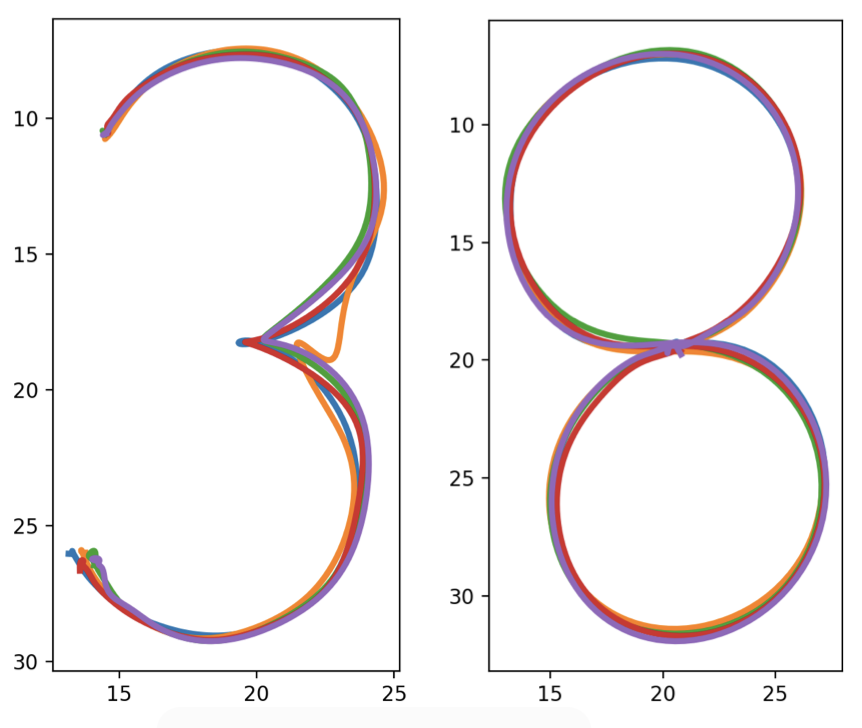
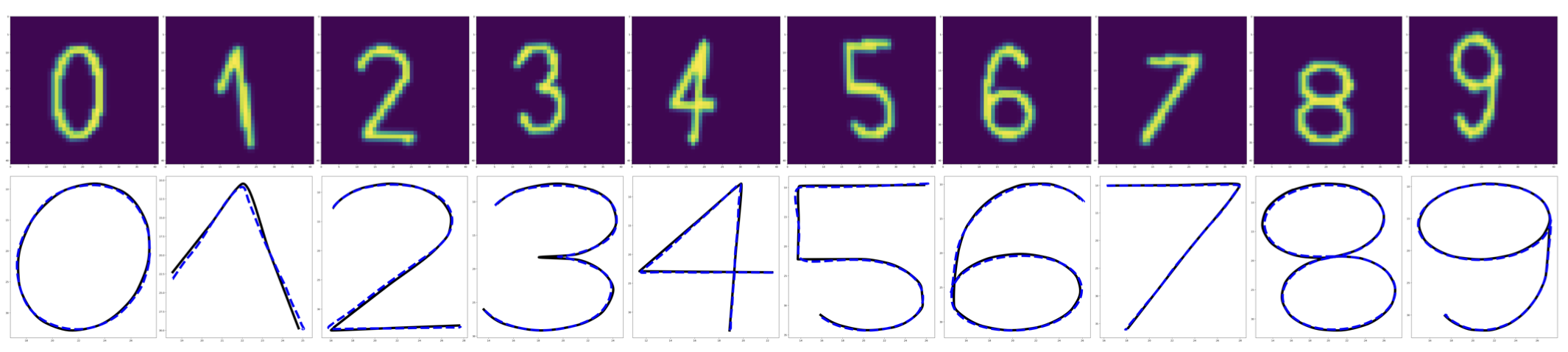
BMP: Bridging the Gap between B-Spline and Movement Primitives
Authors: Weiran Liao, Ge Li, Hongyi Zhou, Rudolf Lioutikov, Gerhard Neumann, @KIT_Karlsruhe
pre-print -> https://arxiv.org/abs/2411.10336
#robotics #movement_primitives #mp #bsplines #planning #robot_learning