That's cool - I recently upgraded my #GoPiGo3 #ROS_2 #Robot to #RaspberryPi5
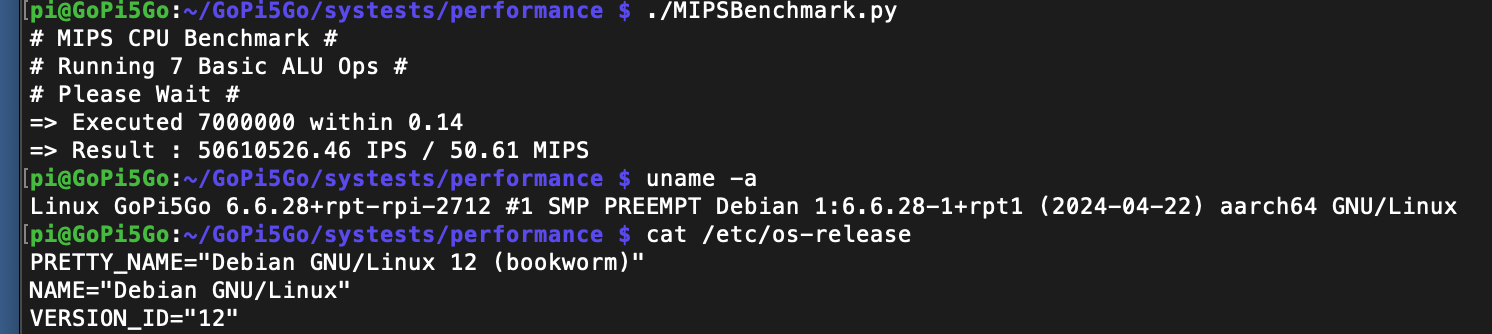
50.62 MIPS on Pi5 running 64-bit #PiOSBookworm with #Python 3.11.2:
That's cool - I recently upgraded my #GoPiGo3 #ROS_2 #Robot to #RaspberryPi5
50.62 MIPS on Pi5 running 64-bit #PiOSBookworm with #Python 3.11.2:
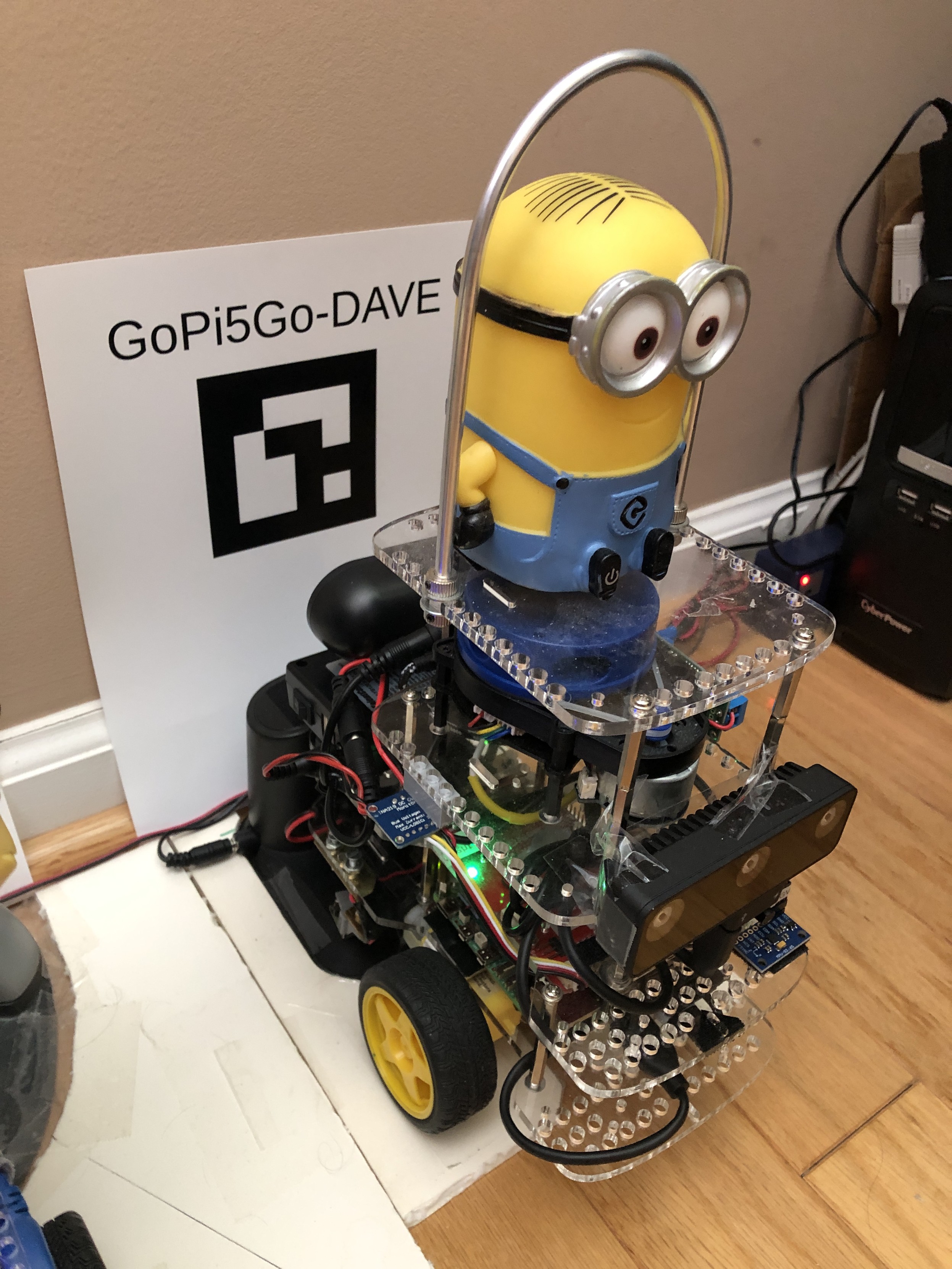
GoPi5Go-Dave Takes His First "JoyRide"
My HumbleDave ROSbot is now reincarnated with a #RaspberryPi5 processor as GoPi5Go-Dave.
I managed to get #ROS2 in #Docker over #PiOSBookworm with all the permissions to access the joystick, and the SPI bus to the #GoPiGo3 #robot platform.
BUT his odometry estimation is still lousy - off by over a meter after his first joyride.
He has been "living 24/7" getting off and on his dock by himself for the last month and a half, while waiting to be ROSified
Oh #robot #wheelencoders - Oh No...
I've been refreshing 20 years forgotten C++ skill with my re-incarnated #RaspberryPi5 #PiOSBookworm powered #GoPiGo3 robot "GoPi5Go-Dave". I and feeling pretty good till I got to watching for 32-bit #unsignedinteger encoder ticks to reach a desired value. Ouch my brain is fried.
I decided it would help if I could run the Python version of the robot API, but the Python GoPiGo3 API was not working on the Pi5 due to lack of pigpiod package for Pi5
...