Motor learning at #SfN24
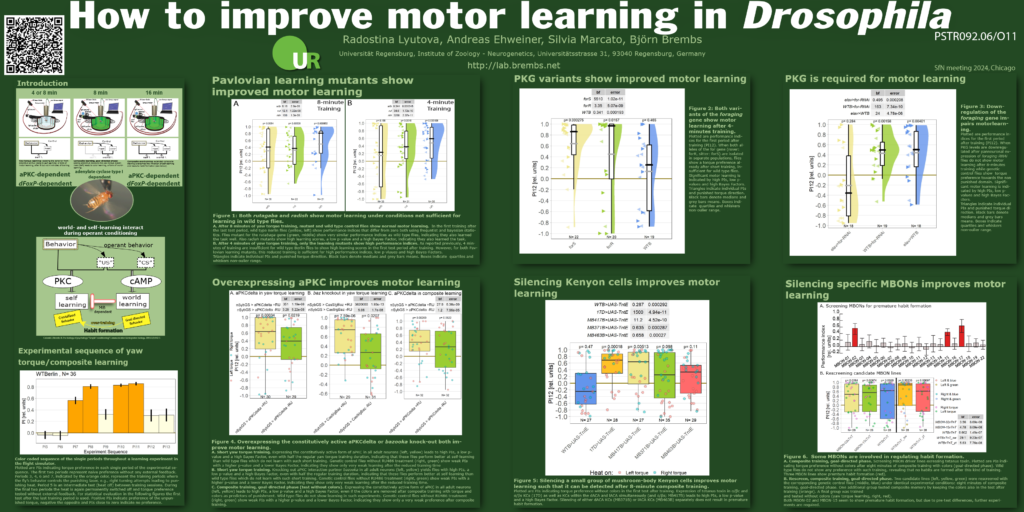
It has been almost 10 years now that we have come to the realization that a particular type of our operant experiments can be classified as motor learning. In such "operant self-learning" experiments, the animal learns about the consequences of its own behavior and adjusts future behavior accordingly. In this experiment, a tethered fly, flying stationarily in an otherwise featureless environment, is trained to avoid/prefer one of two turning directions. The fly is tethered to a torque […]#motorneuron
Features That May Make Motor Neurons Vulnerable to ALS
Motor neurons are distinguished by a set of genes that may enable the large size of the motor neuron cell body and lengthy axon, but also underlie their vulnerability to degeneration. Their molecular profile was defined by genes involved in cytoskeletal structure, which gives the cell shape and organizes the structures within; neurofilament genes related to cell size; and genes linked to the onset of ALS.
#Neuroscience #SpinalCord #Neuron #Motorneuron #MotorneuronDisease #ALS #NeurodegenerativeDiseases #NeurologicalDiseases #Transcriptomics
https://neurosciencenews.com/als-motor-neurons-genetics-22436/
We are looking for a motivated #PhD #student for our group @AarhusUni to explore the role of cullin-3 for #muscle and #motorneuron development as well as the etiology of #neuromuscular diseases.
Contact me for more information!
http://slangelab.org
Deadline: 15 Feb. 2023
Application information:
https://phd.health.au.dk/application/opencalls/exploring-the-role-of-cullin-3-for-muscle-and-motor-neuron-development-as-well-as-the-etiology-of-neuromuscular-myopathies
Client Info
Server: https://mastodon.social
Version: 2025.04
Repository: https://github.com/cyevgeniy/lmst